Maistra architecture
Maistra Service Mesh provides a platform for behavioral insight and operational control over your networked microservices in a service mesh. With Maistra Service Mesh, you can connect, secure, and monitor microservices in your OpenShift Container Platform environment.
Understanding service mesh
A service mesh is the network of microservices that make up applications in a distributed microservice architecture and the interactions between those microservices. When a Maistra grows in size and complexity, it can become harder to understand and manage.
Based on the open source Istio project, Maistra Service Mesh adds a transparent layer on existing distributed applications without requiring any changes to the service code. You add Maistra Service Mesh support to services by deploying a special sidecar proxy to relevant services in the mesh that intercepts all network communication between microservices. You configure and manage the Maistra using the control plane features.
Maistra Service Mesh gives you an easy way to create a network of deployed services that provide:
-
Discovery
-
Load balancing
-
Service-to-service authentication
-
Failure recovery
-
Metrics
-
Monitoring
Maistra Service Mesh also provides more complex operational functions including:
-
A/B testing
-
Canary releases
-
Rate limiting
-
Access control
-
End-to-end authentication
Service Mesh architecture
Service mesh technology operates at the network communication level. That is, service mesh components capture or intercept traffic to and from microservices, either modifying requests, redirecting them, or creating new requests to other services.
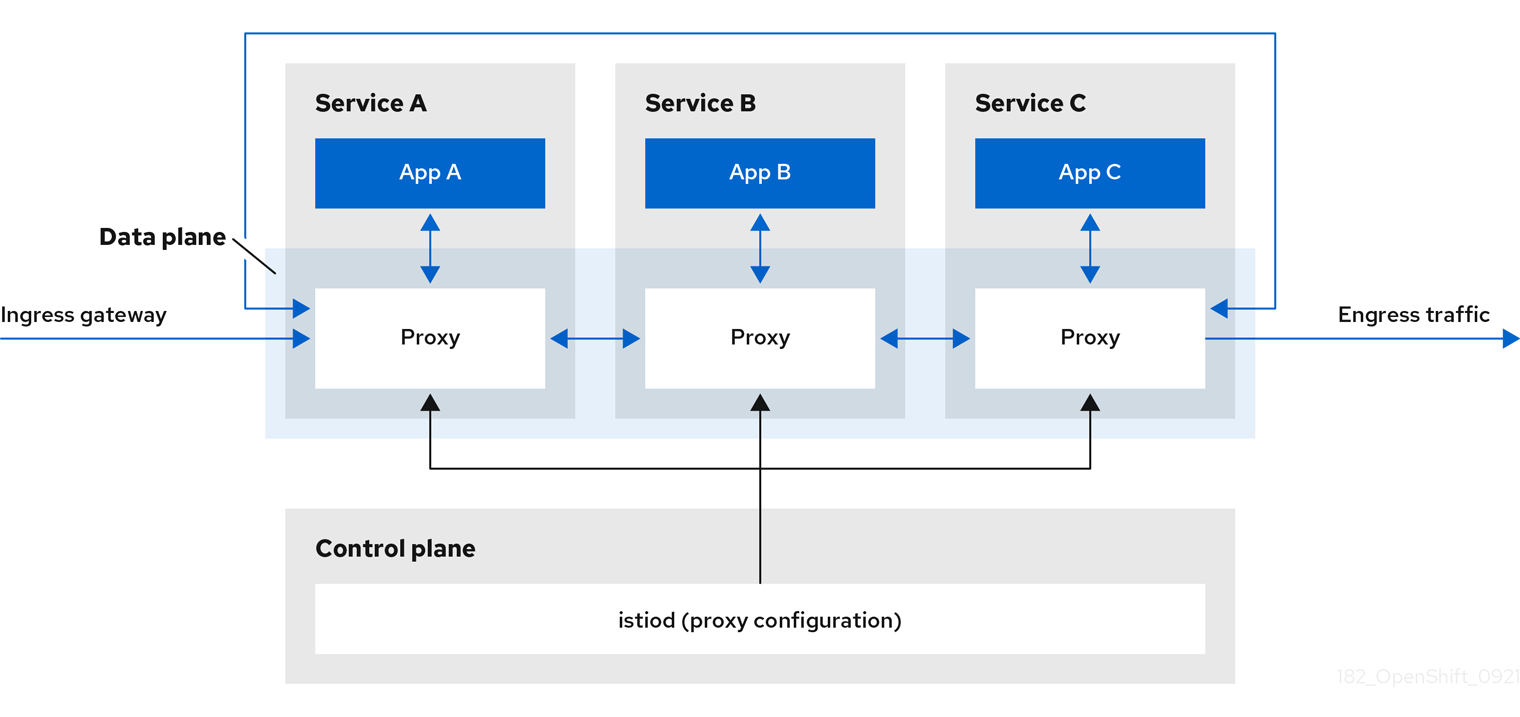
At a high level, Maistra Service Mesh consists of a data plane and a control plane
The data plane is a set of intelligent proxies, running alongside application containers in a pod, that intercept and control all inbound and outbound network communication between microservices in the service mesh. The data plane is implemented in such a way that it intercepts all inbound (ingress) and outbound (egress) network traffic. The Istio data plane is composed of Envoy containers running along side application containers in a pod. The Envoy container acts as a proxy, controlling all network communication into and out of the pod.
-
Envoy proxies are the only Istio components that interact with data plane traffic. All incoming (ingress) and outgoing (egress) network traffic between services flows through the proxies. The Envoy proxy also collects all metrics related to services traffic within the mesh. Envoy proxies are deployed as sidecars, running in the same pod as services. Envoy proxies are also used to implement mesh gateways.
-
Sidecar proxies manage inbound and outbound communication to the workload instance it is attached to.
-
Gateways are proxies operating as load balancers receiving incoming or outgoing HTTP/TCP connections. Gateway configurations are applied to standalone Envoy proxies that are running at the edge of the mesh, rather than sidecar Envoy proxies running alongside your service workloads. You use a Gateway to manage inbound and outbound traffic for your mesh, letting you specify which traffic you want to enter or leave the mesh.
-
Ingress-gateway - Also known as an ingress controller, the Ingress Gateway is a dedicated Envoy proxy that receives and controls traffic entering the service mesh. An Ingress Gateway allows features such as monitoring and route rules to be applied to traffic entering the cluster.
-
Egress-gateway - Also known as an egress controller, the Egress Gateway is a dedicated Envoy proxy that manages traffic leaving the service mesh. An Egress Gateway allows features such as monitoring and route rules to be applied to traffic exiting the mesh.
-
-
The control plane manages and configures the proxies that make up the data plane. It is the authoritative source for configuration, manages access control and usage policies, and collects metrics from the proxies in the service mesh.
-
The Istio control plane is composed of Istiod which consolidates several previous control plane components (Citadel, Galley, Pilot) into a single binary. Istiod provides service discovery, configuration, and certificate management. It converts high-level routing rules to Envoy configurations and propagates them to the sidecars at runtime.
-
Istiod can act as a Certificate Authority (CA), generating certificates supporting secure mTLS communication in the data plane. You can also use an external CA for this purpose.
-
Istiod is responsible for injecting sidecar proxy containers into workloads deployed to an OpenShift cluster.
-
Maistra Service Mesh uses the istio-operator to manage the installation of the control plane. An Operator is a piece of software that enables you to implement and automate common activities in your OpenShift cluster. It acts as a controller, allowing you to set or change the desired state of objects in your cluster, in this case, a Maistra Service Mesh installation.
Maistra Service Mesh also bundles the following Istio add-ons as part of the product:
-
Kiali - Kiali is the management console for Maistra Service Mesh. It provides dashboards, observability, and robust configuration and validation capabilities. It shows the structure of your service mesh by inferring traffic topology and displays the health of your mesh. Kiali provides detailed metrics, powerful validation, access to Grafana, and strong integration for distributed tracing with Jaeger.
-
Prometheus - Maistra Service Mesh uses Prometheus to store telemetry information from services. Kiali depends on Prometheus to obtain metrics, health status, and mesh topology.
-
Jaeger - Maistra Service Mesh supports Jaeger for distributed tracing. Jaeger is an open source traceability server that centralizes and displays traces associated with a single request between multiple services. Using Jaeger you can monitor and troubleshoot your microservices-based distributed systems.
-
Elasticsearch - ElasticSearch is an open source, distributed, JSON-based search and analytics engine. Jaeger uses ElasticSearch for distributed storage and indexing for logging and tracing data.
-
Grafana - Grafana provides mesh administrators with advanced query and metrics analysis and dashboards for Istio data. Optionally, Grafana can be used to analyze service mesh metrics.
The following Istio adapters are supported with Maistra Service Mesh:
-
3scale - The 3scale Istio adapter is an optional component that integrates Maistra Service Mesh with Red Hat 3scale API Management solutions. The default Maistra Service Mesh installation does not include this component.
For information about how to install the 3scale adapter, refer to the 3scale Istio adapter documentation
Understanding Kiali
Kiali provides visibility into your service mesh by showing you the microservices in your service mesh, and how they are connected.
Kiali overview
Kiali provides observability into the Maistra running on OpenShift Container Platform. Kiali helps you define, validate, and observe your Istio service mesh. It helps you to understand the structure of your service mesh by inferring the topology, and also provides information about the health of your service mesh.
Kiali provides an interactive graph view of your namespace in real time that provides visibility into features like circuit breakers, request rates, latency, and even graphs of traffic flows. Kiali offers insights about components at different levels, from Applications to Services and Workloads, and can display the interactions with contextual information and charts on the selected graph node or edge. Kiali also provides the ability to validate your Istio configurations, such as gateways, destination rules, virtual services, mesh policies, and more. Kiali provides detailed metrics, and a basic Grafana integration is available for advanced queries. Distributed tracing is provided by integrating Jaeger into the Kiali console.
Kiali is installed by default as part of the Maistra Service Mesh.
Kiali architecture
Kiali is composed of two components: the Kiali application and the Kiali console.
-
Kiali application (back end) – This component runs in the container application platform and communicates with the service mesh components, retrieves and processes data, and exposes this data to the console. The Kiali application does not need storage. When deploying the application to a cluster, configurations are set in ConfigMaps and secrets.
-
Kiali console (front end) – The Kiali console is a web application. The Kiali application serves the Kiali console, which then queries the back end for data to present it to the user.
In addition, Kiali depends on external services and components provided by the container application platform and Istio.
-
Red Hat Service Mesh (Istio) - Istio is a Kiali requirement. Istio is the component that provides and controls the service mesh. Although Kiali and Istio can be installed separately, Kiali depends on Istio and will not work if it is not present. Kiali needs to retrieve Istio data and configurations, which are exposed through Prometheus and the cluster API.
-
Prometheus - A dedicated Prometheus instance is included as part of the Maistra Service Mesh installation. When Istio telemetry is enabled, metrics data are stored in Prometheus. Kiali uses this Prometheus data to determine the mesh topology, display metrics, calculate health, show possible problems, and so on. Kiali communicates directly with Prometheus and assumes the data schema used by Istio Telemetry. Prometheus is an Istio dependency and a hard dependency for Kiali, and many of Kiali’s features will not work without Prometheus.
-
Cluster API - Kiali uses the API of the OpenShift Container Platform (cluster API) to fetch and resolve service mesh configurations. Kiali queries the cluster API to retrieve, for example, definitions for namespaces, services, deployments, pods, and other entities. Kiali also makes queries to resolve relationships between the different cluster entities. The cluster API is also queried to retrieve Istio configurations like virtual services, destination rules, route rules, gateways, quotas, and so on.
-
Jaeger - Jaeger is optional, but is installed by default as part of the Maistra Service Mesh installation. When you install Jaeger as part of the default Maistra Service Mesh installation, the Kiali console includes a tab to display Jaeger’s tracing data. Note that tracing data will not be available if you disable Istio’s distributed tracing feature. Also note that user must have access to the namespace where the control plane is installed to view Jaeger data.
-
Grafana - Grafana is optional, but is installed by default as part of the Maistra Service Mesh installation. When available, the metrics pages of Kiali display links to direct the user to the same metric in Grafana. Note that user must have access to the namespace where the control plane is installed to view links to the Grafana dashboard and view Grafana data.
Kiali features
The Kiali console is integrated with Red Hat Service Mesh and provides the following capabilities:
-
Health – Quickly identify issues with applications, services, or workloads.
-
Topology – Visualize how your applications, services, or workloads communicate via the Kiali graph.
-
Metrics – Predefined metrics dashboards let you chart service mesh and application performance for Go, Node.js. Quarkus, Spring Boot, Thorntail and Vert.x. You can also create your own custom dashboards.
-
Tracing – Integration with Jaeger lets you follow the path of a request through various microservices that make up an application.
-
Validations – Perform advanced validations on the most common Istio objects (Destination Rules, Service Entries, Virtual Services, and so on).
-
Configuration – Optional ability to create, update and delete Istio routing configuration using wizards or directly in the YAML editor in the Kiali Console.
Understanding Jaeger
Every time a user takes an action in an application, a request is executed by the architecture that may require dozens of different services to participate to produce a response. The path of this request is a distributed transaction. Jaeger lets you perform distributed tracing, which follows the path of a request through various microservices that make up an application.
Distributed tracing is a technique that is used to tie the information about different units of work together—usually executed in different processes or hosts—to understand a whole chain of events in a distributed transaction. Distributed tracing lets developers visualize call flows in large service oriented architectures. It can be invaluable in understanding serialization, parallelism, and sources of latency.
Jaeger records the execution of individual requests across the whole stack of microservices, and presents them as traces. A trace is a data/execution path through the system. An end-to-end trace comprises one or more spans.
A span represents a logical unit of work in Jaeger that has an operation name, the start time of the operation, and the duration. Spans may be nested and ordered to model causal relationships.
Jaeger overview
As a service owner, you can use Jaeger to instrument your services to gather insights into your service architecture. Jaeger is an open source distributed tracing platform that you can use for monitoring, network profiling, and troubleshooting the interaction between components in modern, cloud-native, microservices-based applications.
Using Jaeger lets you perform the following functions:
-
Monitor distributed transactions
-
Optimize performance and latency
-
Perform root cause analysis
Jaeger is based on the vendor-neutral OpenTracing APIs and instrumentation.
Jaeger architecture
Jaeger is made up of several components that work together to collect, store, and display tracing data.
-
Jaeger Client (Tracer, Reporter, instrumented application, client libraries)- Jaeger clients are language specific implementations of the OpenTracing API. They can be used to instrument applications for distributed tracing either manually or with a variety of existing open source frameworks, such as Camel (Fuse), Spring Boot (RHOAR), MicroProfile (RHOAR/Thorntail), Wildfly (EAP), and many more, that are already integrated with OpenTracing.
-
Jaeger Agent (Server Queue, Processor Workers) - The Jaeger agent is a network daemon that listens for spans sent over User Datagram Protocol (UDP), which it batches and sends to the collector. The agent is meant to be placed on the same host as the instrumented application. This is typically accomplished by having a sidecar in container environments like Kubernetes.
-
Jaeger Collector (Queue, Workers) - Similar to the Agent, the Collector is able to receive spans and place them in an internal queue for processing. This allows the collector to return immediately to the client/agent instead of waiting for the span to make its way to the storage.
-
Storage (Data Store) - Collectors require a persistent storage backend. Jaeger has a pluggable mechanism for span storage. Note that for this release, the only supported storage is Elasticsearch.
-
Query (Query Service) - Query is a service that retrieves traces from storage.
-
Ingester (Ingester Service) - Jaeger can use Apache Kafka as a buffer between the collector and the actual backing storage (Elasticsearch). Ingester is a service that reads data from Kafka and writes to another storage backend (Elasticsearch).
-
Jaeger Console – Jaeger provides a user interface that lets you visualize your distributed tracing data. On the Search page, you can find traces and explore details of the spans that make up an individual trace.
Jaeger features
Jaeger tracing provides the following capabilities:
-
Integration with Kiali – When properly configured, you can view Jaeger data from the Kiali console.
-
High scalability – The Jaeger backend is designed to have no single points of failure and to scale with the business needs.
-
Distributed Context Propagation – Lets you connect data from different components together to create a complete end-to-end trace.
-
Backwards compatibility with Zipkin – Jaeger has APIs that enable it to be used as a drop-in replacement for Zipkin, but Red Hat is not supporting Zipkin compatibility in this release.
Next steps
-
Prepare to install Maistra Service Mesh in your OpenShift Container Platform environment.